Application of guidance law on missile interception.
Author: Douglas Kaiser
Supervisor: Prof. Tal Shima
Validating guidance laws in a controlled lab environment is an important step towards implementation. There is little good in a law that remains in the realm of theory forever. In order to make this possible our small and agile team creates quadcopter and rover robot control and estimation systems. These systems are capable of guidance demonstrations with multiple quads. The main focus of the guidance laws under investigation is missile interception, both the attacking and defending missiles are modeled with small quadcopters and the target aircraft is modeled with a rover.
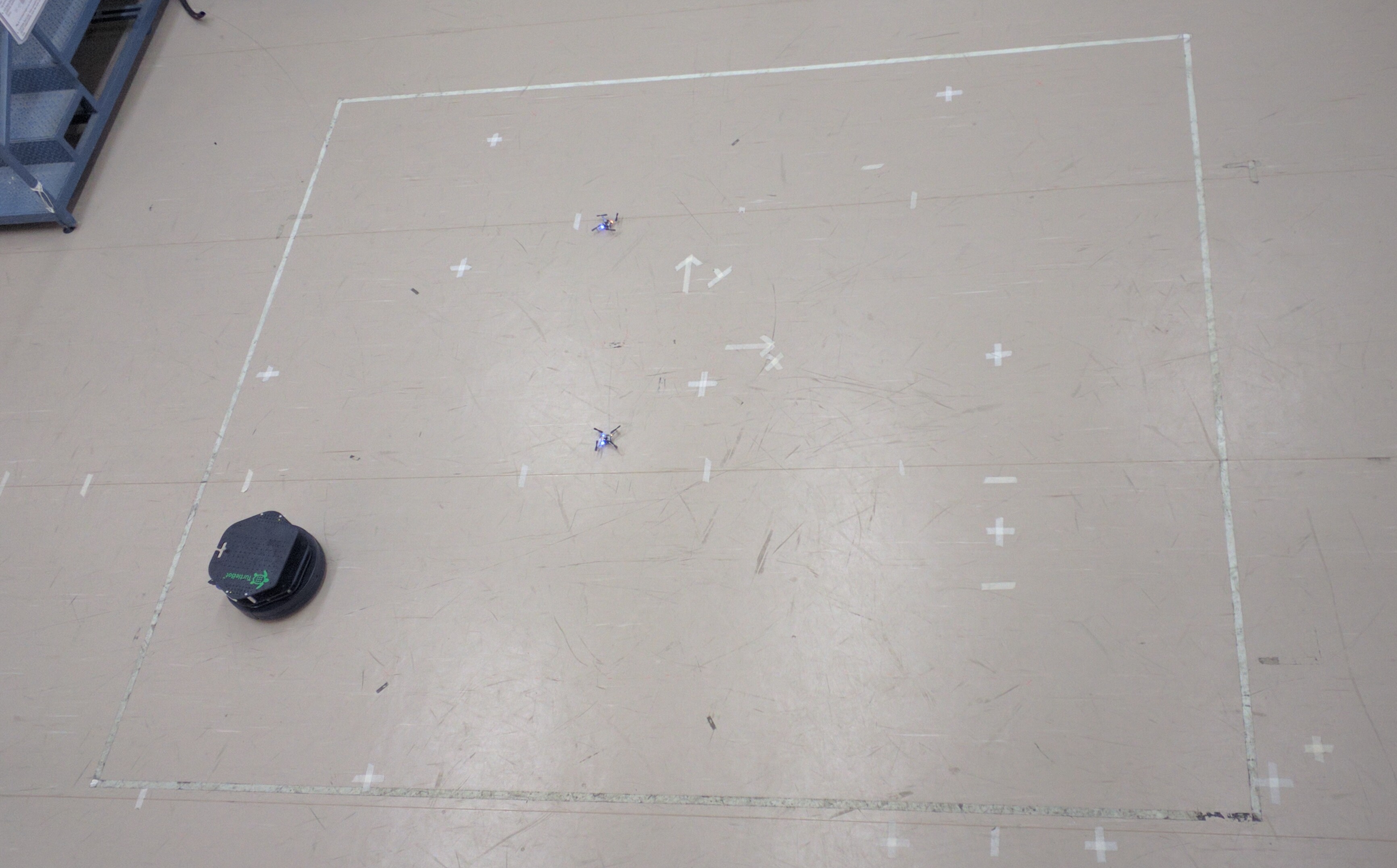
Different fundamental guidance laws like Pure Pursuit and Proportional Navigation are used in different combinations on both missiles. The control system for the quadcopter is accomplished via velocity following rather than position following. Previous iterations were inaccurate and noisy, but the velocity control system better mimics the missile system. The estimation system is a light-weight Kalman filter built for the quadcopter.